Compass linearization — Evolution autopilots
Initial linearization
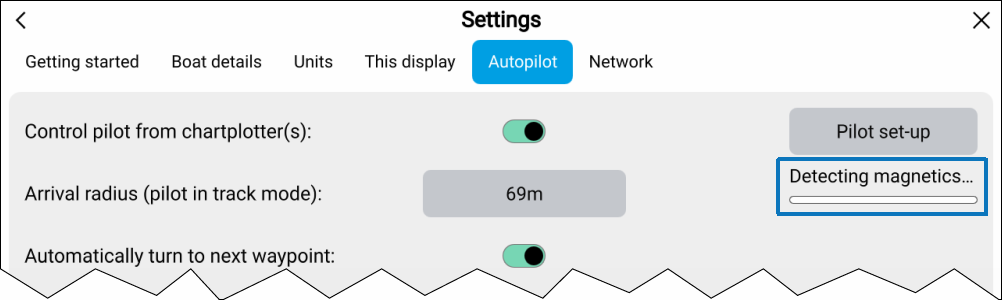
When the EV sensor is first installed and powered-up (or after a factory reset or compass restart) linearization is required. During linearization the Detecting magnetics progress bar is displayed under the Pilot set-up button in the Autopilot settings menu: .
The linearization process will start automatically after your vessel has turned approximately 100° at a speed of between 3 –15 knots. Linearization requires no user input, however at least a 270° turn is required before linearization can complete. The progress bar will fill to indicate progress, the progress bar will turn Red if the process is paused or otherwise interrupted. The time it takes to complete the linearization process will vary according to the characteristics of the vessel, the installation environment of the EV unit, and the levels of magnetic interference at the time of conducting the process. Sources of significant magnetic interference may increase the time required to complete the linearization process. Examples of such sources include:
Marine pontoons
Metal-hulled vessels
Underwater cables
You can speed-up the linearization process by completing a full 360° turn (at a speed of between 3 – 15 knots). You can also restart the linearization process at any time by selecting the Restart Compass from the Pilot set-up menu: .
Once the initial linearization is completed the Maximum compass deviation value is displayed under the Pilot set-up button on the Autopilot settings page.
Compass deviation
If the reported deviation is 45° or higher, it is highly recommended that the EV sensor is moved and re-installed in a location which is subject to less magnetic interference.
If “- -” is displayed as the Deviation value, it means that linearization has not been successfully completed yet.
Check the compass heading data
As part of the autopilot system commissioning process, it is recommended that you check the compass heading value displayed, against a good known heading source on various headings.
Once the linearization process has completed, it is possible that the heading value may have a slight offset of 2 to 3 degrees. This is common where installation space is limited, and the EV sensor cannot be properly aligned to the vessel's longitudinal axis. In this case, it is possible to manually adjust the Compass offset value.
The compass offset can be adjusted from the Pilot set-up menu: .
Do NOT rely on the reported heading until compass linearization and alignment is complete.
System monitoring and adaptation
To ensure optimum performance, after the initial linearization process is complete the EV continues to monitor and adapt the compass linearization to suit current conditions.
Boat speed < 3 knots.
Boat speed > 15 knots.
Rate-of-turn is too slow.
Significant magnetic interference is present.